The I2C-bus shrinks the IC footprint and leads to lower IC costs. Plus, since far fewer copper traces are needed, it enables a smaller PCB, reduces design complexity, and lowers system cost.
The I2C-bus is a de facto world standard that is now implemented in over 1000 different ICs manufactured by more than 50 companies. Additionally, the versatile I2C-bus is used in various control architectures such as System Management Bus (SMBus), Power Management Bus (PMBus), Intelligent Platform Management Interface (IPMI), Display Data Channel (DDC) and Advanced Telecom Computing Architecture (ATCA).
I2C-bus features
Here are some of the features of the I2C-bus:
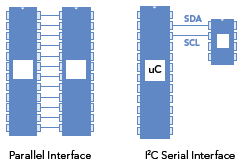
- Only two bus lines are required; a serial data line (SDA) and a serial clock line (SCL).
- Each device connected to the bus is software addressable by a unique address andsimple master/slave relationships exist at all times; masters can operate as master-transmitters or as master-receivers.
- It is a true multi-master bus including collision detection and arbitration to prevent data corruption if two or more masters simultaneously initiate data transfer.
- Serial, 8-bit oriented, bidirectional data transfers can be made at up to 100 kbit/s in the Standard-mode, up to 400 kbit/s in the Fast-mode, up to 1 Mbit/s in Fast-mode Plus, or up to 3.4 Mbit/s in the High-speed mode.
- Serial, 8-bit oriented, unidirectional data transfers up to 5 Mbit/s in Ultra Fast-mode
- On-chip filtering rejects spikes on the bus data line to preserve data integrity.
- The number of ICs that can be connected to the same bus is limited only by a
maximum bus capacitance. More capacitance may be allowed under some
conditions.
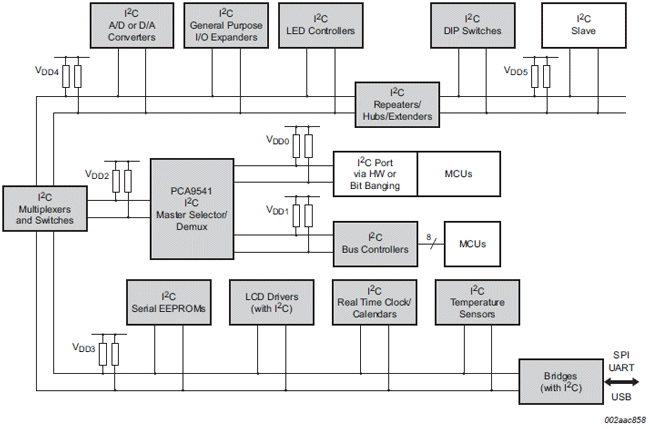
Example of I2C-bus applications
The I2C-bus protocol
Two wires, serial data (SDA) and serial clock (SCL), carry information between the devices connected to the bus. Each device is recognized by a unique address (whether it is a microcontroller, LCD driver, memory or keyboard interface) and can operate as either a transmitter or receiver, depending on the function of the device. An LCD driver may be only a receiver, whereas a memory can both receive and transmit data. In addition to transmitters and receivers, devices can also be considered as masters or slaves when performing data transfers.
A master is the device which initiates a data transfer on the bus and generates the clock signals to permit that transfer. At that time, any device addressed is considered a slave.
| Term | Description |
| Transmitter |
the device which sends data to the bus |
| Receiver |
the device which receives data from the bus |
| Master |
the device which initiates a transfer, generates clock signals and terminates a transfer |
| Slave |
the device addressed by a master |
| Multi-master |
more than one master can attempt to control the bus at the same time without corrupting the message |
| Arbitration |
procedure to ensure that, if more than one master simultaneously tries to control the bus, only one is allowed to do so and the winning message is not corrupted |
| Synchronization |
procedure to synchronize the clock signals of two or more devices |
The I2C-bus is a multi-master bus. This means that more than one device capable of controlling the bus can be connected to it. As masters are usually microcontrollers, let us consider the case of a data transfer between two microcontrollers connected to the I2C-bus.
SDA and SCL signals
Both SDA and SCL are bidirectional lines, connected to a positive supply voltage via a current-source or pull-up resistor. When the bus is free, both lines are HIGH. The output stages of devices connected to the bus must have an open-drain or open-collector to perform the wired-AND function.
Data on the I2C-bus can be transferred at rates of up to 100 kbit/s in the Standard-mode, up to 400 kbit/s in the Fast-mode, up to 1 Mbit/s in Fast-mode Plus, or up to 3.4 Mbit/s in the High-speed mode. The bus capacitance limits the number of interfaces connected to the bus. For a single master application, the master’s SCL output can be a push-pull driver design if there are no devices on the bus which would stretch the clock.
SDA and SCL logic levels
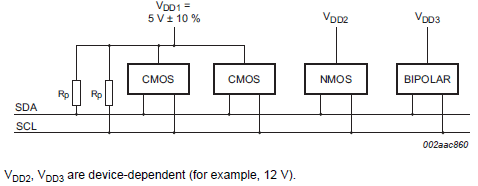
Due to the variety of different technology devices (CMOS, NMOS, bipolar) that can be connected to the I2C-bus, the levels of the logical ‘0’ (LOW) and ‘1’ (HIGH) are not fixed and depend on the associated level of VDD. Input reference levels are set as 30 % and 70 % of VDD; VIL is 0.3VDD and VIH is 0.7VDD. Some legacy device input levels were fixed at VIL = 1.5 V and VIH = 3.0 V, but all new devices require this 30 %/70 % specification.
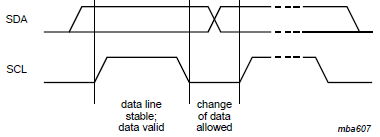
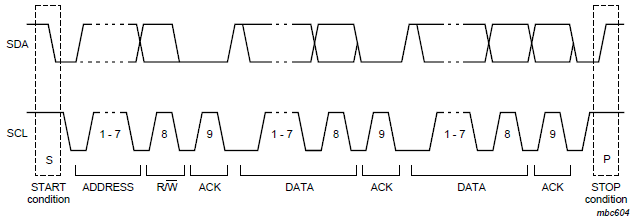
The data on the SDA line must be stable during the HIGH period of the clock. The HIGH or LOW state of the data line can only change when the clock signal on the SCL line is LOW. One clock pulse is generated for each data bit transferred.
START and STOP conditions
All transactions begin with a START (S) and are terminated by a STOP (P).
A HIGH to LOW transition on the SDA line while SCL is HIGH defines a START condition.
A LOW to HIGH transition on the SDA line while SCL is HIGH defines a STOP condition.
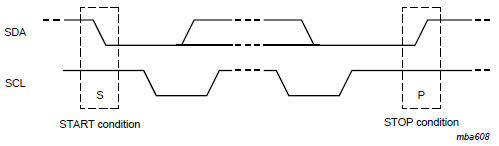
START and STOP conditions are always generated by the master. The bus is considered to be busy after the START condition. The bus is considered to be free again a certain time after the STOP condition.
The bus stays busy if a repeated START (Sr) is generated instead of a STOP condition. In this respect, the START (S) and repeated START (Sr) conditions are functionally identical. For the remainder of this document, therefore, the S symbol is used as a generic term to represent both the START and repeated START conditions, unless Sr is particularly relevant.
Detection of START and STOP conditions by devices connected to the bus is easy if they incorporate the necessary interfacing hardware. However, microcontrollers with no such interface have to sample the SDA line at least twice per clock period to sense the transition.
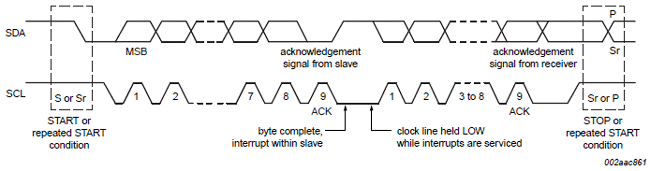
Byte format
Every byte put on the SDA line must be eight bits long. The number of bytes that can be transmitted per transfer is unrestricted. Each byte must be followed by an Acknowledge bit. Data is transferred with the Most Significant Bit (MSB) first. If a slave cannot receive or transmit another complete byte of data until it has performed some other function, for example servicing an internal interrupt, it can hold the clock line SCL LOW to force the master into a wait state. Data transfer then continues when the slave is ready for another byte of data and releases clock line SCL.
Acknowledge (ACK) and Not Acknowledge (NACK)
The acknowledge takes place after every byte. The acknowledge bit allows the receiver to signal the transmitter that the byte was successfully received and another byte may be sent. The master generates all clock pulses, including the acknowledge ninth clock pulse. The Acknowledge signal is defined as follows: the transmitter releases the SDA line during the acknowledge clock pulse so the receiver can pull the SDA line LOW and it remains stable LOW during the HIGH period of this clock pulse. Set-up and hold times (specified in Section 6) must also be taken into account.
When SDA remains HIGH during this ninth clock pulse, this is defined as the Not Acknowledge signal. The master can then generate either a STOP condition to abort the transfer, or a repeated START condition to start a new transfer. There are five conditions that lead to the generation of a NACK:
- No receiver is present on the bus with the transmitted address so there is no device to respond with an acknowledge.
- The receiver is unable to receive or transmit because it is performing some real-time function and is not ready to start communication with the master.
- During the transfer, the receiver gets data or commands that it does not understand.
- During the transfer, the receiver cannot receive any more data bytes.
- A master-receiver must signal the end of the transfer to the slave transmitter.
Clock synchronization
Two masters can begin transmitting on an idle bus at the same time and there must be a method for deciding which takes control of the bus and complete its transmission. This is done by clock synchronization and arbitration. In single master systems, clock synchronization and arbitration are not needed.
Clock synchronization is performed using the wired-AND connection of I2C interfaces to the SCL line. This means that a HIGH to LOW transition on the SCL line causes the masters concerned to start counting off their LOW period and, once a master clock has gone LOW, it holds the SCL line in that state until the clock HIGH state is reached. However, if another clock is still within its LOW period, the LOW to HIGH transition of this clock may not change the state of the SCL line. The SCL line is therefore held LOW by the master with the longest LOW period. Masters with shorter LOW periods enter a HIGH wait-state during this time.
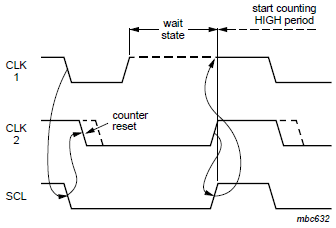
When all masters concerned have counted off their LOW period, the clock line is released and goes HIGH. There is then no difference between the master clocks and the state of the SCL line, and all the masters start counting their HIGH periods. The first master to complete its HIGH period pulls the SCL line LOW again. In this way, a synchronized SCL clock is generated with its LOW period determined by the master with the longest clock LOW period, and its HIGH period determined by the one with the shortest clock HIGH period.
Arbitration
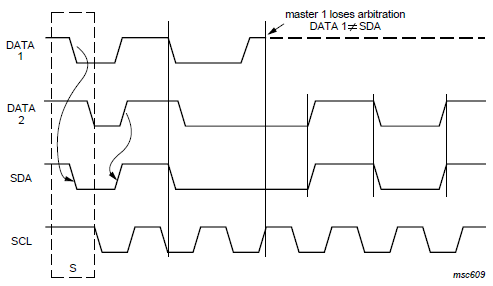
Arbitration, like synchronization, refers to a portion of the protocol required only if more than one master is used in the system. Slaves are not involved in the arbitration procedure. A master may start a transfer only if the bus is free. Two masters may generate a START condition within the minimum hold time (tHD;STA) of the START condition which results in a valid START condition on the bus. Arbitration is then required to determine which master will complete its transmission. Arbitration proceeds bit by bit. During every bit, while SCL is HIGH, each master checks to see if the SDA level matches what it has sent. This process may take many bits. Two masters can actually complete an entire transaction without error, as long as the transmissions are identical. The first time a master tries to send a HIGH, but detects that the SDA level is LOW, the master knows that it has lost the arbitration and turns off its SDA output driver. The other master goes on to complete its transaction.
No information is lost during the arbitration process. A master that loses the arbitration can generate clock pulses until the end of the byte in which it loses the arbitration and must restart its transaction when the bus is idle.
If a master also incorporates a slave function and it loses arbitration during the addressing stage, it is possible that the winning master is trying to address it. The losing master must therefore switch over immediately to its slave mode.
The figure below shows the arbitration procedure for two masters. More may be involved depending on how many masters are connected to the bus. The moment there is a difference between the internal data level of the master generating DATA1 and the actual level on the SDA line, the DATA1 output is switched off. This does not affect the data transfer initiated by the winning master.
Since control of the I2C-bus is decided solely on the address and data sent by competing masters, there is no central master, nor any order of priority on the bus.
There is an undefined condition if the arbitration procedure is still in progress at the moment when one master sends a repeated START or a STOP condition while the other master is still sending data. In other words, the following combinations result in an undefined condition:
- Master 1 sends a repeated START condition and master 2 sends a data bit.
- Master 1 sends a STOP condition and master 2 sends a data bit.
- Master 1 sends a repeated START condition and master 2 sends a STOP condition.
Clock stretching
Clock stretching pauses a transaction by holding the SCL line LOW. The transaction cannot continue until the line is released HIGH again. Clock stretching is optional and in fact, most slave devices do not include an SCL driver so they are unable to stretch the clock.
On the byte level, a device may be able to receive bytes of data at a fast rate, but needs more time to store a received byte or prepare another byte to be transmitted. Slaves can then hold the SCL line LOW after reception and acknowledgment of a byte to force the master into a wait state until the slave is ready for the next byte transfer in a type of handshake procedure.
On the bit level, a device such as a microcontroller with or without limited hardware for the I2C-bus, can slow down the bus clock by extending each clock LOW period. The speed of any master is adapted to the internal operating rate of this device.
In Hs-mode, this handshake feature can only be used on byte level.
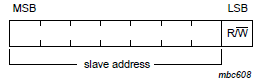
The slave address and R/W bit
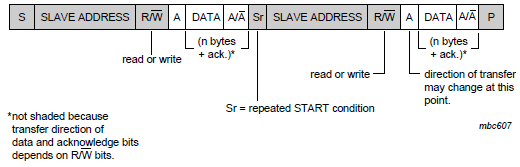
Data transfers follow the format shown in the figure below. After the START condition (S), a slave address is sent. This address is seven bits long followed by an eighth bit which is a data direction bit (R/W) — a ‘zero’ indicates a transmission (WRITE), a ‘one’ indicates a request for data (READ).
A data transfer is always terminated by a STOP condition (P) generated by the master. However, if a master still wishes to communicate on the bus, it can generate a repeated START condition (Sr) and address another slave without first generating a STOP condition. Various combinations of read/write formats are then possible within such a transfer.
A complete data transfer
The first byte after the START procedure
Possible data transfer formats are:
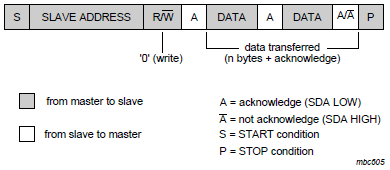
- Master-transmitter transmits to slave-receiver. The transfer direction is not changed. The slave receiver acknowledges each byte.
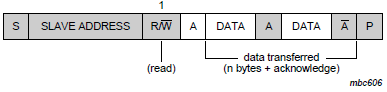
- Master reads slave immediately after first byte. At the moment of the first acknowledge, the master-transmitter becomes a master-receiver and the slave-receiver becomes a slave-transmitter. This first acknowledge is still generated by the slave. The master generates subsequent acknowledges. The STOP condition is generated by the master, which sends a not-acknowledge (A) just before the STOP condition.
- Combined format. During a change of direction within a transfer, the START condition and the slave address are both repeated, but with the R/W bit reversed. If a master-receiver sends a repeated START condition, it sends a not-acknowledge (A) just before the repeated START condition.
Notes:
- Combined formats can be used, for example, to control a serial memory. The internal memory location must be written during the first data byte. After the START condition and slave address is repeated, data can be transferred.
- All decisions on auto-increment or decrement of previously accessed memory locations, etc., are taken by the designer of the device.
- Each byte is followed by an acknowledgment bit as indicated by the A or A blocks in the sequence.
- I2C-bus compatible devices must reset their bus logic on receipt of a START or repeated START condition such that they all anticipate the sending of a slave address, even if these START conditions are not positioned according to the proper format.
- A START condition immediately followed by a STOP condition (void message) is an illegal format. Many devices however are designed to operate properly under this condition.
- Each device connected to the bus is addressable by a unique address. Normally a simple master/slave relationship exists, but it is possible to have multiple identical slaves that can receive and respond simultaneously, for example in a group broadcast. This technique works best when using bus switching devices like the PCA9546A where all four channels are on and identical devices are configured at the same time, understanding that it is impossible to determine that each slave acknowledges, and then turn on one channel at a time to read back each individual device’s configuration to confirm the programming. Refer to individual component data sheets.
10-bit addressing
10-bit addressing expands the number of possible addresses. Devices with 7-bit and 10-bit addresses can be connected to the same I2C-bus, and both 7-bit and 10-bit addressing can be used in all bus speed modes. Currently, 10-bit addressing is not being widely used.
Reserved addresses
Two groups of eight addresses (0000 XXX and 1111 XXX) are reserved for the purposes shown in the table below.
| Slave address | R/W bit | Description |
| 0000 000 |
0 |
general call address[1] |
| 0000 000 |
1 |
START byte[2] |
| 0000 001 |
x |
CBUS address[3] |
| 0000 010 |
x |
reserved for different bus format[4] |
| 0000 011 |
x |
reserved for future purposes |
| 0000 1XX |
x |
Hs-mode master code |
| 1111 1XX |
x |
reserved for future purposes |
| 1111 0XX |
x |
10-bit slave addressing |
[1] The general call address is used for several functions including software reset.
[2] No device is allowed to acknowledge at the reception of the START byte.
[3] The CBUS address has been reserved to enable the inter-mixing of CBUS compatible and I2C-bus compatible devices in the same system. I2C-bus compatible devices are not allowed to respond on reception of this address.
[4] The address reserved for a different bus format is included to enable I2C and other protocols to be mixed. Only I2C-bus compatible devices that can work with such formats and protocols are allowed to respond to this address.
Assignment of addresses within a local system is up to the system architect who must take into account the devices being used on the bus and any future interaction with other conventional I2C-buses. For example, a device with seven user-assignable address pins allows all 128 addresses to be assigned. If it is known that the reserved address is never going to be used for its intended purpose, a reserved address can be used for a slave address.
The I2C-bus committee coordinates allocation of I2C addresses. Further information can be obtained from the NXP web site www.nxp.com/i2c.
General call address
The general call address is for addressing every device connected to the I2C-bus at the same time. However, if a device does not need any of the data supplied within the general call structure, it can ignore this address by not issuing an acknowledgment. If a device does require data from a general call address, it acknowledges this address and behave as a slave-receiver. The master does not actually know how many devices acknowledged if one or more devices respond. The second and following bytes are acknowledged by every slave-receiver capable of handling this data. A slave who cannot process one of these bytes must ignore it by not-acknowledging. Again, if one or more slaves acknowledge, the not-acknowledge will not be seen by the master. The meaning of the general call address is always specified in the second byte.
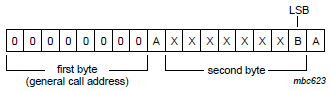
There are two cases to consider:
- When the least significant bit B is a ‘zero’.
- When the least significant bit B is a ‘one’.
When bit B is a ‘zero’, the second byte has the following definition:
- 0000 0110 (06h): Reset and write programmable part of slave address by hardware. On receiving this 2-byte sequence, all devices designed to respond to the general call address reset and take in the programmable part of their address. Precautions must be taken to ensure that a device is not pulling down the SDA or SCL line after applying the supply voltage, since these low levels would block the bus.
- 0000 0100 (04h): Write programmable part of slave address by hardware. Behaves as above, but the device does not reset.
- 0000 0000 (00h): This code is not allowed to be used as the second byte.
Sequences of programming procedure are published in the appropriate device data sheets. The remaining codes have not been fixed and devices must ignore them.
When bit B is a ‘one’, the 2-byte sequence is a ‘hardware general call’. This means that the sequence is transmitted by a hardware master device, such as a keyboard scanner, which can be programmed to transmit a desired slave address. Since a hardware master does not know in advance to which device the message has to be transferred, it can only generate this hardware general call and its own address — identifying itself to the system.
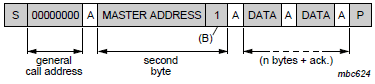
The seven bits remaining in the second byte contain the address of the hardware master. This address is recognized by an intelligent device (for example, a microcontroller) connected to the bus which then accepts the information from the hardware master. If the hardware master can also act as a slave, the slave address is identical to the master address.
Software reset
Following a General Call, (0000 0000), sending 0000 0110 (06h) as the second byte causes a software reset. This feature is optional and not all devices respond to this command. On receiving this 2-byte sequence, all devices designed to respond to the general call address reset and take in the programmable part of their address. Precautions must be taken to ensure that a device is not pulling down the SDA or SCL line after applying the supply voltage, since these low levels would block the bus.
START byte
Microcontrollers can be connected to the I2C-bus in two ways. A microcontroller with an on-chip hardware I2C-bus interface can be programmed to be only interrupted by requests from the bus. When the device does not have such an interface, it must constantly monitor the bus via software. Obviously, the more times the microcontroller monitors, or polls the bus, the less time it can spend carrying out its intended function.
There is therefore a speed difference between fast hardware devices and a relatively slow microcontroller which relies on software polling.
In this case, data transfer can be preceded by a start procedure which is much longer than
normal. The start procedure consists of:
- A START condition (S)
- A START byte (0000 0001)
- An acknowledge clock pulse (ACK)
- A repeated START condition (Sr).
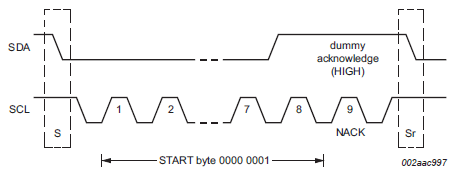
After the START condition S has been transmitted by a master which requires bus access, the START byte (0000 0001) is transmitted. Another microcontroller can therefore sample the SDA line at a low sampling rate until one of the seven zeros in the START byte is detected. After detection of this LOW level on the SDA line, the microcontroller can switch to a higher sampling rate to find the repeated START condition Sr which is then used for synchronization.
A hardware receiver resets upon receipt of the repeated START condition Sr and therefore ignores the START byte.
An acknowledge-related clock pulse is generated after the START byte. This is present only to conform with the byte handling format used on the bus. No device is allowed to acknowledge the START byte.
Bus clear
In the unlikely event where the clock (SCL) is stuck LOW, the preferential procedure is to reset the bus using the HW reset signal if your I2C devices have HW reset inputs. If the I2C devices do not have HW reset inputs, cycle power to the devices to activate the mandatory internal Power-On Reset (POR) circuit.
If the data line (SDA) is stuck LOW, the master should send nine clock pulses. The device that held the bus LOW should release it sometime within those nine clocks. If not, then use the HW reset or cycle power to clear the bus.
Bibliography
Some information, material and related graphics ("Materials") available on this page are provided by NXP Semiconductors web site http://www.nxp.com. This Materials are only for informational use.
NXP UM10204 - I2C-bus specification and user manual Rev. 4 — 13 February 2012 http://www.nxp.com/documents/user_manual/UM10204.pdf
NXP I2C-bus solutions - http://ics.nxp.com/literature/other/interface/pdf/i2c.solutions.pdf